Ардуино с серводвигателем
Используя Arduino с серводвигателями, мы можем точно контролировать положение его вала, потому что серводвигатели работают с механизмом обратной связи, чтобы определить положение его вала. Положение вала постоянно измеряется встроенным потенциометром внутри серводвигателя, который сравнивает его с целевым положением, установленным микроконтроллером (например, Arduino). Вычисляя ошибку между целевым положением и фактическим положением, микроконтроллер регулирует свой выходной вал, чтобы он соответствовал целевому положению. Всю эту систему можно описать как замкнутая система .
Arduino управляет серводвигателями с помощью ШИМ-сигнала. Этот управляющий сигнал подается на управляющий контакт серводвигателя. Ширина ШИМ-сигнала определяет положение вала. В таблице ниже показано управление положением серводвигателя с помощью ШИМ-сигнала.
| Ширина ШИМ (мс) | Положение вала (угол) |
|---|---|
| 1 мс | 0˚ градусов Мин. |
| 1,5 мс | 90˚ градусов нейтрального положения |
| 2 мс | 180˚ градусов Макс. |
Серводвигателям обычно требуется ШИМ-импульс каждые 20 мс или 50 Гц. Большинство серводвигателей RC могут нормально работать в диапазоне частот от 40 до 200 Гц.
Пины серводвигателя
Большинство серводвигателей, используемых с Arduino, имеют три контакта.
- Земля Серводвигатели имеют контакт GND, который обычно имеет черный цвет.
- Контакт питания Контакт 5 В необходим для питания серводвигателя. Контакт питания обычно красного цвета.
- Контрольный штифт Движение вала серводвигателя контролируется управляющим штифтом. Этот вывод подключен к цифровому выводу Arduino.
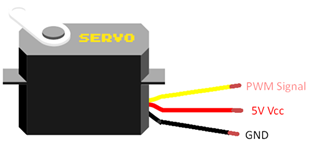
Серводвигатели доступны в различных цветовых схемах, но хорошая новость заключается в том, что все серводвигатели имеют контакты, как правило, в одном и том же порядке, просто цветовая кодировка отличается.
Проводной сервопривод с Arduino
Большинство серводвигателей работают от 5В. Для питания сервопривода с помощью Arduino нам нужно подключить 5-вольтовый контакт Arduino к контакту питания сервопривода. Arduino имеет ограниченный диапазон для потребления тока. Обычно к Arduino можно подключить один или два мотора. Чтобы управлять несколькими серводвигателями с помощью Arduino, мы должны питать их от внешнего источника.
При питании сервопривода следует помнить о следующей конфигурации контактов:
| Пин серводвигателя | Пин-код Arduino |
|---|---|
| Мощность (красный) | 5V Pin или внешний источник питания |
| Земля (черная или коричневая) | Блок питания и Arduino GND |
| Контакт управления (желтый, оранжевый или белый) | Цифровой вывод Arduino |
Для подключения серводвигателей к Arduino возможны следующие две конфигурации:
- Провод с использованием Arduino 5V Pin
- Провод с использованием внешнего питания с Arduino
Провод с использованием контакта Arduino 5V
Серводвигатель можно запитать с помощью контакта Arduino 5V, но нужно следить за тем, чтобы Arduino мог подавать на сервопривод максимальный ток 500 мА. Если двигатели потребляют ток выше этого предела, Arduino автоматически перезагрузится, и он также может потерять питание.
Ниже приведено графическое изображение соединения Arduino с серводвигателем:
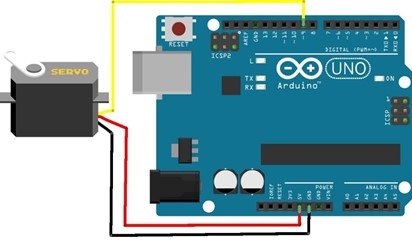
Здесь цифровой контакт 9 Arduino подключен к контакту управления серводвигателем, а питание и контакт GND сервопривода подключены к контактам 5V и GND Arduino соответственно.
Провод с использованием внешнего питания с Arduino
Arduino может подавать ограниченный ток на серводвигатели, поэтому нам нужно подключить внешний источник питания. Используя отдельный источник питания для серводвигателей, мы можем подключить к Arduino столько двигателей, сколько захотим, но помните о цифровых выводах, доступных на платах Arduino. Если вы хотите подключить несколько серводвигателей, рекомендуется использовать платы Arduino Mega или Arduino, которые могут предоставить больше контактов для управления всеми двигателями.
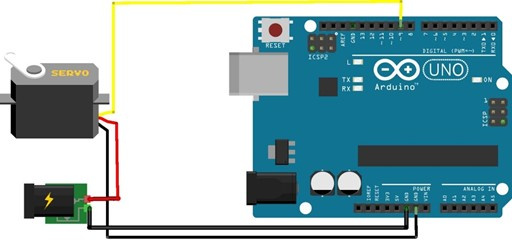
Здесь питание серводвигателя и контакт заземления подключены к контактам внешнего источника питания, а контакт управления подключен к цифровому контакту Arduino, как в приведенной выше конфигурации.
Вывод
Серводвигатели — отличный способ разработки проектов робототехники. Благодаря своей гибкости в отношении механизмов управления пользователи Arduino получают возможность разрабатывать проекты по своему выбору. Серводвигатель можно подключить к Arduino с помощью питания и цифровых контактов. Принимая во внимание, что всегда ищите потребности двигателя в энергии, прежде чем подключать его к Arduino. Чтобы подключить несколько двигателей к Arduino, вам необходимо использовать внешний источник питания.